


🚀 5강: 계층적 요구사항 관리 – 시스템에서 SW까지
안녕하세요 여러분! 🌟
오늘은 요구사항 관리의 꽃이라 불리는 _계층적 요구사항 관리_에 대해 알아보겠습니다.
"큰 그림에서 작은 디테일까지" 연결하는 이 과정은, 프로젝트가 길을 잃지 않도록 해주는 나침반 같은 역할을 해요. 🧭
1. 왜 계층적 관리가 필요할까요? 🤔
시스템 개발은 _레고 블록 조립_과 비슷합니다.
- 레고 상자(시스템 요구사항)를 열면,
- 각 블록(하위 요구사항)들이 서로 딱 맞게 연결되어야 멋진 완성품(시스템) 🎁 이 탄생하죠.
만약 상위 요구사항과 하위 요구사항이 따로 놀면?
👉 “버스 도착 시간은 정확해야 한다”라는 요구가 있는데, 실제 하위 요구사항이 “버스에 빨간색 페인트 칠하기”라면… 완전 동문서답이죠. 🚍🎨
2. 상위 → 하위 요구사항 추적성 확보 🔗
추적성(traceability)은 “위에서 말한 걸, 아래에서 어떻게 지켰는가?”를 확인하는 연결선이에요.
이 선이 없다면 요구사항은 종이 위의 글자에 불과합니다.
예시:
- 상위 요구사항(시스템 레벨)
- “시스템은 운전자 입력에 따라 기어 변속을 지원해야 한다.”
- 하위 요구사항(SW 레벨)
- “SW는 변속 레버가 D에 위치할 때, 50ms 이내에 CAN 신호를 송출해야 한다.”
👉 이렇게 명확하게 연결해 두면, 상위 요구사항이 제대로 구현되었는지 검증할 수 있어요 ✅
3. 기능 분해와 인터페이스 정의 🧩
상위 요구사항은 보통 큰 목표를 말합니다.
이를 실제 구현 가능한 기능 단위로 쪼개는 게 기능 분해(functional decomposition)예요.
예시 🚗
- 상위: “차량은 자동 주차 기능을 제공해야 한다.”
- 기능 분해:
- 센서 시스템은 주변 물체를 감지한다.
- 제어 소프트웨어는 경로를 계산한다.
- 액추에이터는 차량을 조향한다.
이때 중요한 게 인터페이스 정의예요.
- 센서 → 제어 SW : 감지된 거리 데이터 전송
- 제어 SW → 액추에이터 : 조향 각도 제어 신호 송출

👉 인터페이스가 명확하지 않으면 “네가 해줄 줄 알았어”라는 오해가 생겨버립니다. (마치 단체 과제에서 역할 안 나눈 상황처럼요😂)
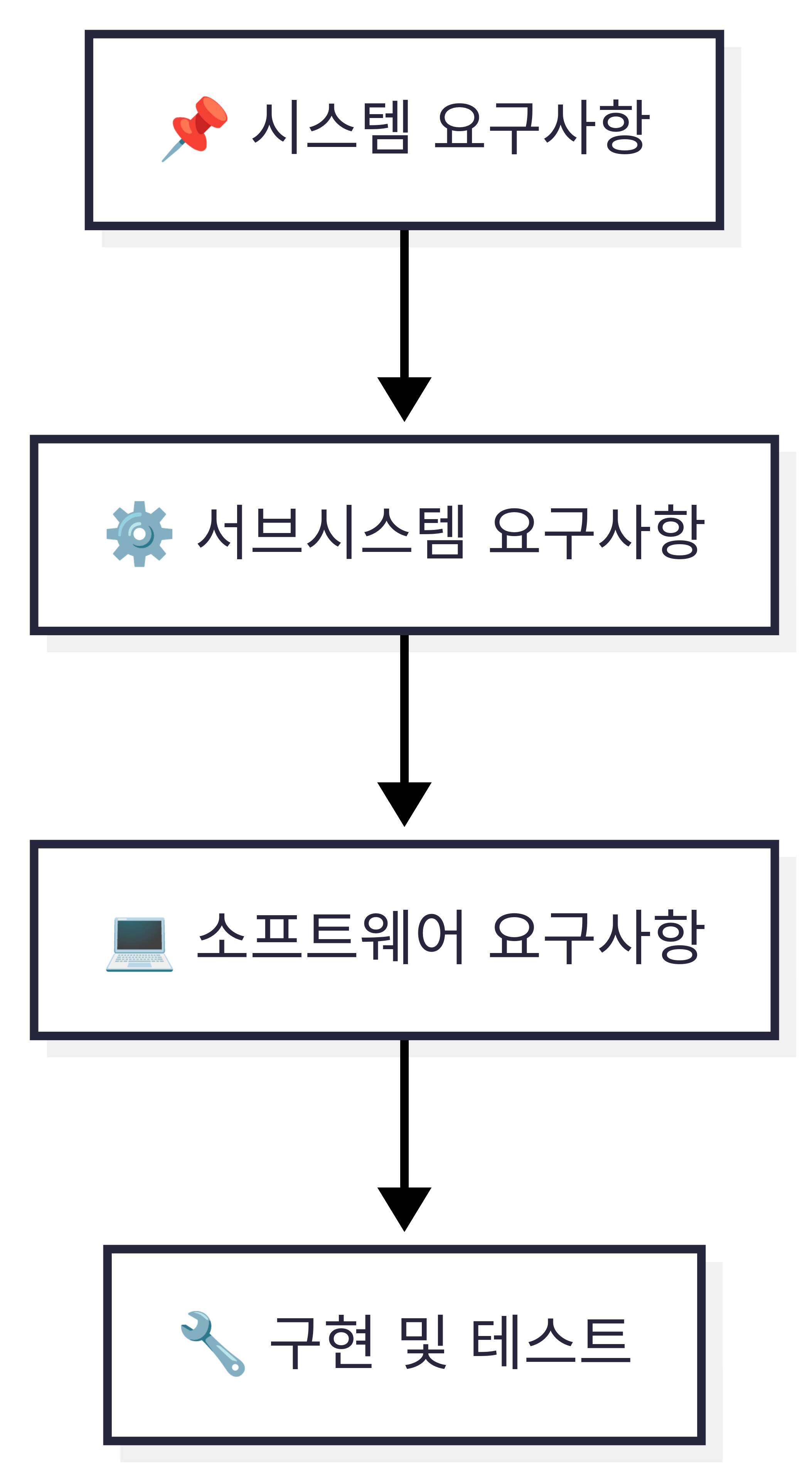
4. 한눈에 보는 계층 구조 🏗️
시스템 요구사항
└─ 기능 요구사항
└─ SW 요구사항
└─ 코드/테스트 케이스
이렇게 피라미드처럼 내려오면서 구체화 + 추적성 확보가 동시에 이루어져야 합니다.
5. 오늘의 핵심 정리 ✨
- 추적성은 상위 → 하위 요구사항 연결선이다 🔗
- 기능 분해는 큰 그림을 작은 조각으로 쪼개는 과정이다 🧩
- 인터페이스 정의는 각 조각이 제대로 맞물리도록 하는 접착제 역할을 한다 🧷
🔜 다음 시간 예고!
다음 6강에서는 모호성 제거 기법을 다룰 거예요.
“빠르게, 적절하게, 충분히” 같은 말이 얼마나 위험한지 아시나요? 🚫
👉 금지어와 정량화를 통해 요구사항의 모호함을 없애는 비법을 알려드리겠습니다!
그럼 오늘도 즐거운 개발 되세요! 😄🎉
'System Dev. > RM' 카테고리의 다른 글
| (RM 7강) 자동차 표준과 요구사항 품질 (ISO 26262, A-SPICE, ISO/SAE 21434 연계) (0) | 2025.09.09 |
|---|---|
| (RM 6강) 모호성 제거 기법 – 금지어와 정량화 (0) | 2025.09.03 |
| (RM 4강) 잘못된 요구사항 사례와 개선하기 (1) | 2025.08.25 |
| (RM 3강) EARS(Easy Approach to Requirements Syntax) 소개 (0) | 2025.08.23 |
| (RM 2강) 좋은 요구사항의 5대 원칙 – SMART하게 쓰자! (4) | 2025.08.19 |